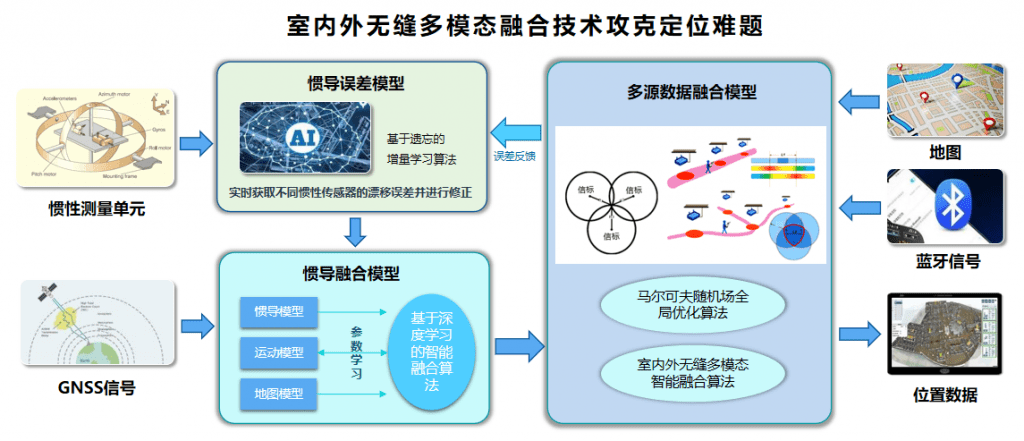
上海寻位科技如何利用人工智能技术解决惯性导航定位中的累积误差问题? 发表评论 / 行业动态 / 作者: 市场部 在惯性导航定位中,累积误差是一个普遍存在的问题.随着时间的推移,由于传感器自身的噪声和漂移等因素,测量值会不断累积,导致位置和速度估计出现偏差。 为了解决这个问题,我们在人员定位系统中,利用多源信号融合定位算法来提高定位精度,同时利用深度学习等人工智能技术来处理惯性导航定位中的累积误差问题。通过优化的算法实现了高达0.3%的定位精度,1公里内定位误差控制在3米之内。 多源信号融合定位技术示意图 惯性导航定位的优势在于不依赖于外部环境,能够提供高频率的位置和速度信息。通过结合蓝牙技术和GPS北斗技术,以及多源传感器融合技术,我们能够更好地满足用户的需求,并为化工企业提供更为精准和可靠的人员定位服务,提高生产效率和安全性。