
随着现代科技的迅猛发展,露天矿山人员定位系统已经成为确保矿山作业安全和管理的重要工具。本文介绍了一种基于GPS(全球定位系统)和惯性导航的露天矿山人员定位系统,并详细讨论了该系统具备的功能。通过结合GPS和惯性导航技术,该系统能够提供准确的人员定位信息,实现对矿工的实时监控和管理,从而提高矿山作业的安全性和效率。

编辑搜图
露天矿山作业环境复杂,人员安全管理是矿山管理者的首要任务。传统的人员定位方法存在一些限制,如信号覆盖范围有限、定位精度不高等。基于GPS和惯性导航的人员定位系统能够克服这些限制,并提供更精确和实时的人员定位信息。
GPS和惯性导航技术概述
GPS(Global Positioning System)是一种基于卫星定位技术的全球导航系统,用于确定地球上任何一个点的精确位置和时间。GPS定位系统的原理和工作方式如下:
-
原理:
GPS定位系统基于三角测量原理,利用卫星和接收器之间的距离来确定接收器的位置。系统由一组位于地球轨道上的24颗GPS卫星组成,它们以不同的轨道高度和角度分布在地球周围。每颗卫星都具有精确的轨道参数和时间同步功能。 -
工作方式:
(a)卫星发射信号:GPS卫星通过无线电波向地面发射信号,信号包含了卫星的位置、时间以及其他导航信息。
(b)接收器接收信号:GPS接收器是安装在地面或移动设备上的设备,它接收来自多颗卫星的信号。
(c)信号测量:接收器通过测量接收到的卫星信号的传播时间和信号强度,计算出与各颗卫星之间的距离。这称为伪距测量。
(d)三角定位:通过接收与至少三颗卫星的信号,并结合卫星位置信息,接收器使用三角测量原理来计算出接收器的位置。更多的卫星被使用,可以提高定位的准确性和精度。
(e)位置计算:接收器使用测量到的伪距和卫星位置信息,通过解算算法(如三角定位算法或最小二乘法),计算出接收器的精确位置。
(f)时间同步:GPS接收器还可以通过接收卫星发射的时间信号来同步自己的时钟,从而获得精确的时间信息。值得注意的是:GPS定位系统的准确性受多种因素影响,如可见卫星数量、卫星位置分布、信号传播的多径效应、大气延迟等。因此,在使用GPS定位时,应考虑这些因素,并采取相应的校正和改进措施,以提高定位的精度和可靠性。
惯性导航技术:
惯性导航系统是一种利用惯性力学原理实现定位和导航的技术。它通过测量和积分加速度和角速度来确定运动物体的位置、速度和姿态。惯性导航系统的原理和构成如下:
-
原理:
惯性导航系统基于牛顿第二定律和刚体动力学原理。根据牛顿第二定律,物体的加速度与作用在它上面的合力成正比,而与物体的质量成反比。通过测量物体的加速度和角速度,可以获得物体所受的力和力矩,从而推导出物体的运动状态。 -
构成:
(a)加速度计(Accelerometer):加速度计用于测量物体在三个坐标轴上的加速度。它通常基于微机电系统(MEMS)技术,利用质量和弹性元件的相对运动来检测加速度。常见的加速度计类型包括压电式、电容式和磁阻式等。
(b)陀螺仪(Gyroscope):陀螺仪用于测量物体绕三个坐标轴的角速度。它基于旋转惯性的原理,通过检测角动量守恒来测量角速度。陀螺仪的常见类型包括机械陀螺仪、光纤陀螺仪和MEMS陀螺仪等。
(c)导航计算单元:导航计算单元是惯性导航系统的核心部件,它负责接收加速度计和陀螺仪的测量数据,并进行数据处理和融合。通过积分和滤波算法,导航计算单元可以计算出物体的位置、速度和姿态信息。常见的算法包括卡尔曼滤波、扩展卡尔曼滤波和粒子滤波等。
(d)校准装置:惯性导航系统中的加速度计和陀螺仪需要进行定期的校准,以消除误差和漂移。校准装置可以是机械装置、电子校准电路或软件算法等,用于准确校正测量数据。
惯性导航系统具有高精度、实时性强和不受外界环境干扰的特点,广泛应用于航空航天、导弹制导、舰船导航、车辆导航和惯性导航辅助系统等领域。然而,惯性导航系统也存在累积误差和漂移问题,因此通常需要与其他定位系统(如GPS)进行融合,以提高定位精度和稳定性。
基于GPS和惯性导航的露天矿山人员定位系统架构
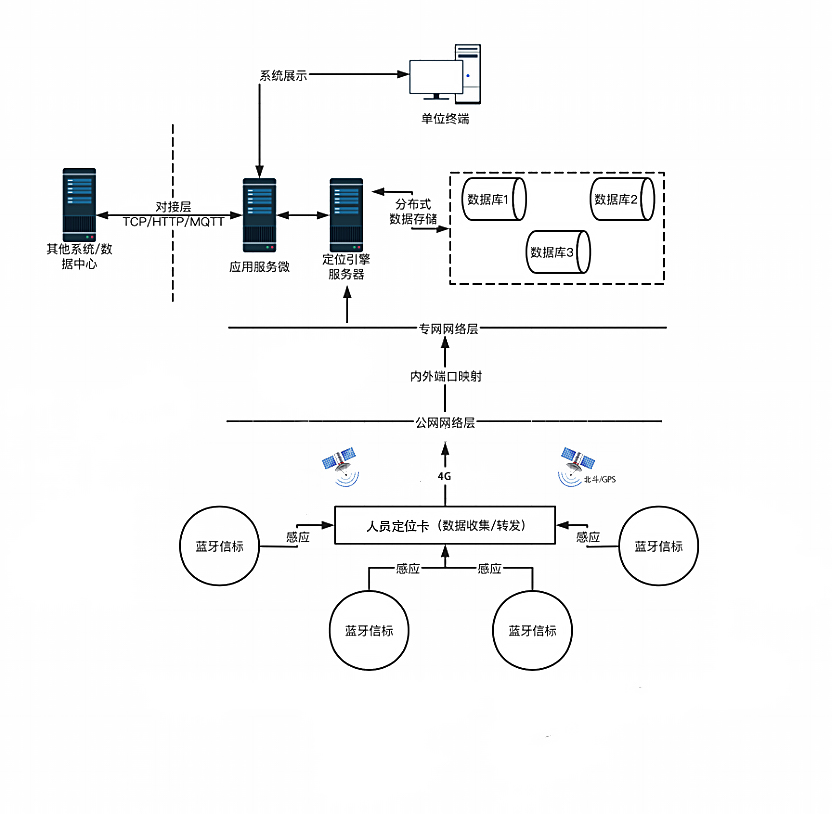
基于GPS和惯性导航的露天矿山人员定位系统可以采用以下架构:
- GPS接收器:系统中的每个人员都携带一个GPS接收器,用于接收卫星发射的GPS信号。GPS接收器可以测量每个人员相对于卫星的位置信息,并将数据传输给中央处理单元。
- 惯性导航单元:每个人员定位设备中都集成了惯性导航单元,包括加速度计和陀螺仪。惯性导航单元用于测量人员的加速度和角速度,以估计其位置、速度和姿态信息。
- 中央处理单元:中央处理单元是系统的核心,负责接收来自所有人员的GPS和惯性导航数据。它将这些数据进行融合和处理,以计算每个人员的准确位置和运动轨迹。
- 数据传输网络:为了实现实时定位和监控,系统需要一个可靠的数据传输网络,将人员的位置数据从每个定位设备传输到中央处理单元。可以使用无线通信技术(蓝牙或移动网络)或有线连接(如以太网)来实现数据传输。
- 数据存储和分析:中央处理单元将人员的位置数据存储在数据库中,同时可以进行实时分析和后续的数据挖掘。这些数据可以用于监测人员的活动、安全管理、事故预防和生产效率优化等方面。
- 可视化界面:系统可以提供一个可视化界面,用于实时显示人员的位置和轨迹。这可以是一个地图界面,显示矿山区域和人员位置的实时更新。操作人员可以监控人员的位置,并作出相应的决策和调度。
- 报警和安全功能:系统可以集成报警和安全功能,例如,在发生紧急情况或违规活动时,中央处理单元可以触发警报,向相关人员发送警报信息,并采取相应的安全措施。
基于GPS和惯性导航的露天矿山人员定位系统结合了卫星定位和惯性导航技术,能够实时准确地追踪和监控矿山人员的位置和活动,提高工作安全性和管理效率。
编辑搜图
系统功能
实时人员定位:通过GPS和惯性导航技术,系统能够实时准确地定位矿工的位置,并将位置数据传输至监控中心。
路线规划和导航:系统可以为矿工提供最佳的行进路径规划和导航功能,避免走入危险区域或迷路。
紧急救援功能:系统能够迅速响应紧急情况,提供矿工的准确位置信息,以便救援人员迅速到达。
数据分析和报告生成:系统能够对定位数据进行分析,生成报告和统计信息,帮助管理者了解矿山作业情况,并做出相应决策。

编辑搜图
请点击输入图片描述(最多18字)
上海寻位科技(https://www.seekloca.com/)基于GPS和惯性导航的露天矿山人员定位系统具备的功能,包括实时人员定位、路线规划和导航、紧急救援功能以及数据分析和报告生成。该系统的应用能够提高矿山作业的安全性和效率,为矿山管理者提供准确的人员定位信息,帮助管理人员做出科学决策。

