随着工业自动化技术的快速发展,传统定位方法已经无法满足日益增长的定位精度、实时性和环境适应性需求。惯性导航定位技术作为一种高精度、实时、自主定位的方法,逐渐在工业自动化生产领域中得到广泛应用。本文将对上海寻位科技惯性导航定位技术(https://www.seekloca.com/)在工业自动化生产过程中的应用浅析。
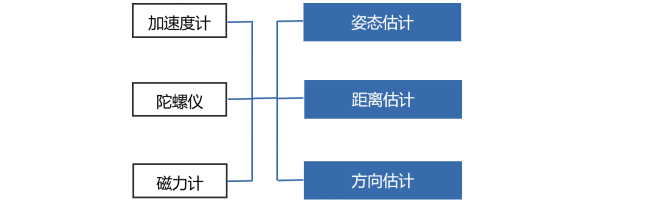
惯性导航系统(INS)是一种基于惯性测量装置(IMU)的自主定位系统。IMU是一种集成了陀螺仪和加速度计的测量装置,用于测量载体的角速度和线性加速度。通过对IMU输出的角速度和加速度进行积分计算,可以得到载体的姿态、速度和位置信息。
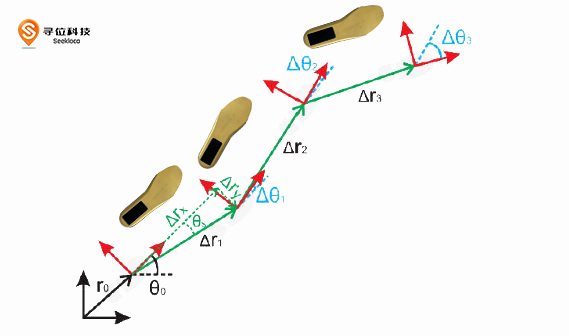
在 INS 中,陀螺仪用于测量载体的角速度,加速度计用于测量载体在各个方向上的线性加速度。这些数据经过解算,可以得到载体的姿态、速度和位置信息。由于 INS 是一种完全自主的定位技术,不需要依赖外部信号,因此具有较高的实时性和环境适应性。
3. 惯性导航定位技术关键技术
3.1 陀螺仪
陀螺仪是惯性导航系统的核心器件之一,用于测量载体的角速度。根据工作原理,陀螺仪可分为机械陀螺仪、光学陀螺仪、振动陀螺仪等。随着微电子和微机械技术的发展,微机电系统(MEMS)陀螺仪逐渐成为工业自动化生产中的主流选择,因为其具有体积小、重量轻、低功耗和低成本的优势。
3.2 加速度计
加速度计是另一种关键的惯性测量器件,用于测量载体在各个方向上的线性加速度。加速度计的种类繁多,包括机械加速度计、电容式加速度计、压阻式加速度计等。在工业自动化生产中,MEMS加速度计具有广泛的应用前景,因其具备低成本、低功耗、高可靠性等优点。
3.3 惯性导航定位算法
惯性导航定位算法是 INS 的核心技术之一,负责根据角速度和加速度数据计算载体的姿态、速度和位置信息。常见的算法有卡尔曼滤波算法、扩展卡尔曼滤波算法、无迹卡尔曼滤波算法等。随着计算能力的提高和人工智能技术的发展,深度学习方法在惯性导航定位算法中的应用逐渐成为研究热点,如卷积神经网络(CNN)、循环神经网络(RNN)等。
4.1 无人搬运车定位
在工业自动化生产线中,无人搬运车(AGV)已广泛应用于货物的搬运和分拣任务。利用惯性导航定位技术,AGV可以实现高精度、实时的自主定位,有效提高了搬运效率和准确性。
4.2 工业机器人定位与控制
工业机器人在自动化生产过程中起着关键作用。借助惯性导航定位技术,可以实现对机器人末端执行器的精确定位和控制,进而提高生产效率和产品质量。
4.3 仓储物流管理
在仓储物流管理中,惯性导航定位技术可以应用于货物的追踪与管理,实现对货物的实时监督和精确定位,从而降低库存成本、提高库存周转率。

4.4 工业生产环境监测
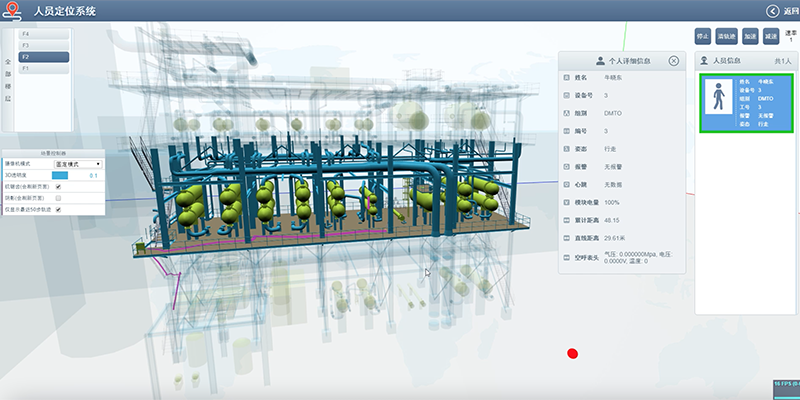
惯性导航定位技术还可用于工业生产环境的监测。通过部署搭载惯性导航系统的移动监测设备,可以对生产现场的环境参数进行实时监测和分析,为生产过程提供数据支持。

5. 发展趋势
随着惯性导航定位技术的不断发展和成熟,其在工业自动化生产领域的应用将进一步拓展。未来的发展趋势主要体现在以下几个方面:
集成化和模块化:随着器件技术的进步,未来惯性导航系统将朝着集成化和模块化的方向发展,实现更高的性能、更小的体积和更低的成本。
智能化算法:深度学习等人工智能技术将在惯性导航定位算法中得到更广泛的应用,提高定位算法的准确性和鲁棒性。
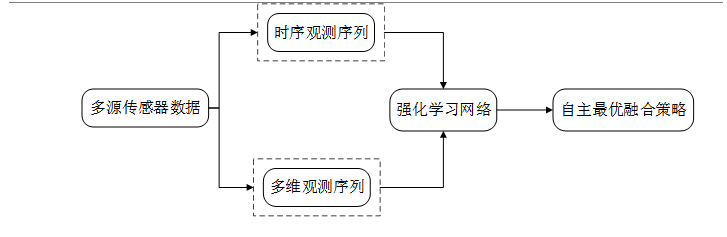
多传感器融合:结合其他定位技术,如卫星导航、光学定位等,实现多传感器数据融合,进一步提高定位精度和可靠性。
应用领域拓展:随着技术的不断创新,惯性导航定位技术将在工业自动化生产领域找到更多的应用场景,推动工业生产进入更高水平的自动化阶段。

