
随着工业自动化和智能化的发展,钢铁厂的生产环境越来越复杂。为了确保员工的安全和提高生产效率,一个可靠且精确的室内外人员定位系统是必不可少的。本文主要介绍上海寻位科技钢铁厂室内外人员定位系统的主要功能,并结合惯性导航定位原理进行详细阐述(https://www.seekloca.com/)。

1. 钢铁厂室内外人员定位系统的主要功能
钢铁厂室内外人员定位系统的主要功能包括以下几点:
实时定位:系统能够实时监测并获取员工在厂区内的准确位置信息,以便于管理者迅速作出相应决策。
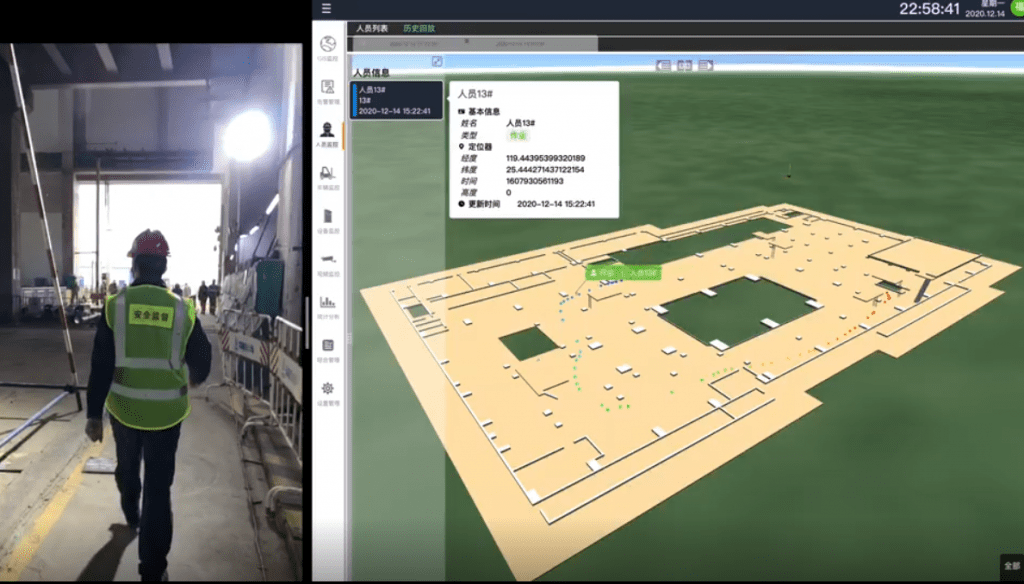
轨迹回放:通过记录员工的移动轨迹,可以回放分析员工在特定时间段内的活动情况,有助于改进工作流程和提高工作效率。
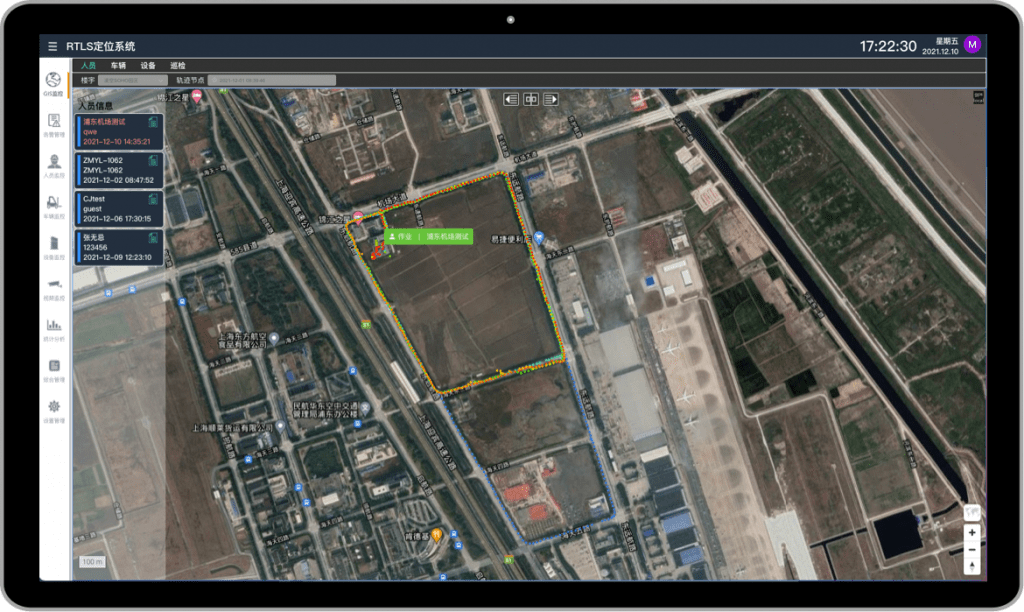
区域划分与告警:系统可以将厂区划分为不同的区域,根据员工进入的区域设置不同的权限和告警规则,以确保员工在特定区域内遵守规定。

安全应急处理:在发生事故或紧急情况时,系统能够迅速定位受影响的员工,并提供相应的救援措施,以降低事故的严重程度。
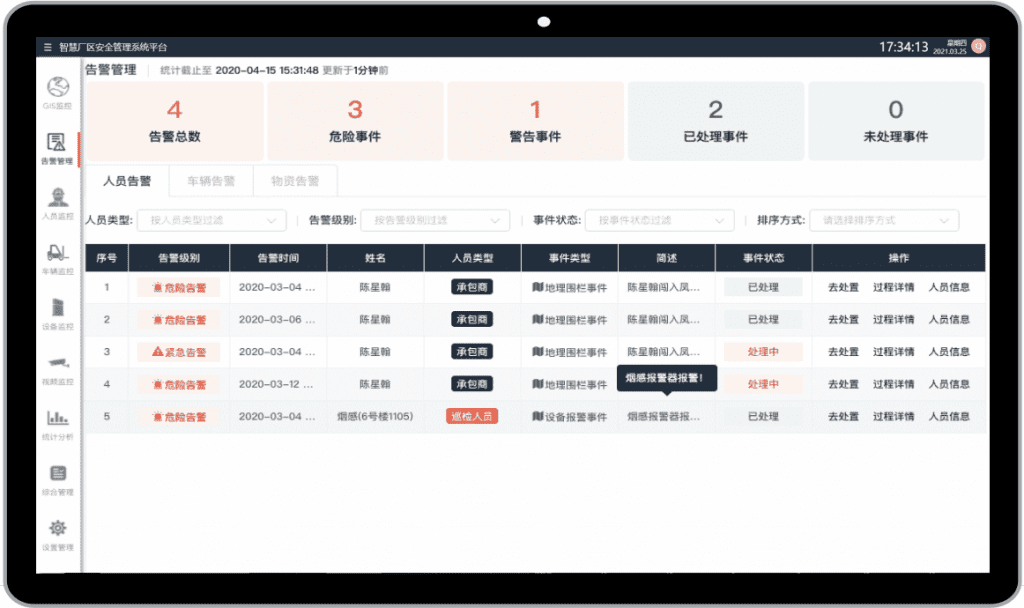
数据统计与分析:系统可以对员工的定位数据进行统计和分析,生成相关报告,有助于管理者了解员工的工作情况和改进管理策略。
2. 惯性导航定位原理
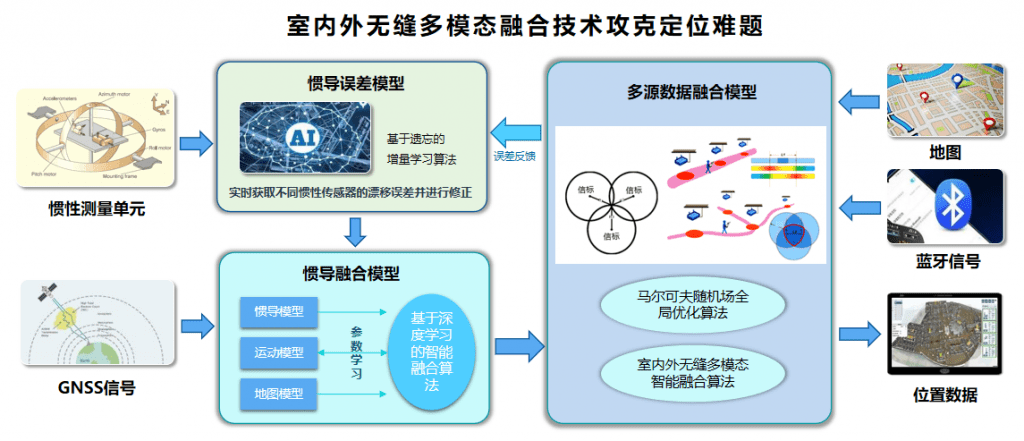
惯性导航定位系统(INS,Inertial Navigation System)是一种利用惯性测量单元(IMU,Inertial Measurement Unit)测量物体在运动过程中的加速度和角速度信息,通过积分计算得出物体的位移和姿态信息的自主导航系统。惯性导航定位原理可以分为以下几个部分:
2.1 惯性测量单元
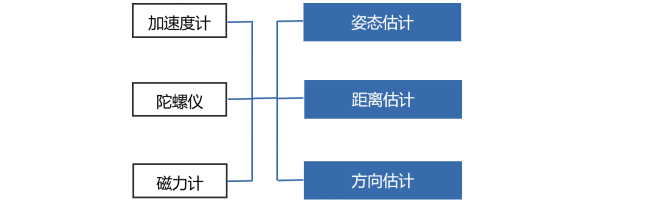
惯性测量单元是惯性导航定位系统的核心部件,通常包括三个正交安装的加速度计和三个正交安装的陀螺仪。加速度计用于测量物体在三个正交方向上的加速度信息,而陀螺仪则用于测量物体在三个正交方向上的角速度信息。
2.2 姿态解算
根据陀螺仪测量得到的角速度信息,可以通过姿态解算算法计算出物体在运动过程中的姿态信息。常用的姿态解算算法有四元数、欧拉角和旋转矩阵等。
2.3 位置计算
利用加速度计测量得到的加速度信息,结合姿态信息,可以通过双重积分计算出物体在运动过程中的位移信息。然后,将位移信息与物体的初始位置相加,得到物体的实时位置。
2.4 误差修正
由于惯性导航定位系统是一种自主导航系统,其定位精度受到测量误差的累积影响。为了提高定位精度,通常需要引入其他辅助定位手段进行误差修正。常用的误差修正方法有卡尔曼滤波(Kalman Filter)、扩展卡尔曼滤波(Extended Kalman Filter)和粒子滤波(Particle Filter)等。
3. 钢铁厂室内外人员定位系统的实现方案
结合钢铁厂室内外环境的特点和需求,上海寻位科技自主研发的基于惯性导航定位原理的人员定位系统实现方案。
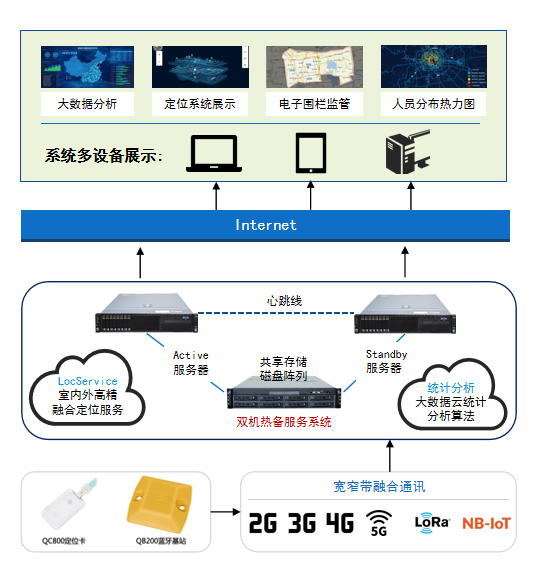
3.1 硬件设备
为每位员工配备一个携带式惯性导航定位设备,该设备内置有高精度的惯性测量单元(IMU),用于实时测量员工的加速度和角速度信息。同时,设备还应具备与外部辅助定位系统(如GPS、Wi-Fi、蓝牙等)进行数据交换的功能,以便于在室外环境下提高定位精度。

3.2 软件系统
上海寻位科技人员定位系统用于接收和处理来自硬件设备的加速度、角速度和辅助定位数据,实时计算员工的位置和姿态信息。软件系统还应具备数据存储、轨迹回放、区域划分与告警、安全应急处理和数据统计与分析等功能。
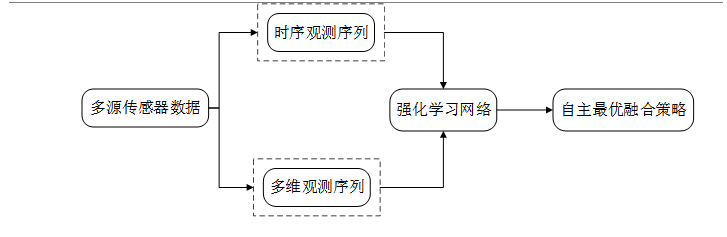
3.3 误差修正策略
在室外环境下,可以利用GPS等卫星导航系统提供的位置信息进行误差修正;在室内环境下,可以利用Wi-Fi、蓝牙等无线通信技术提供的基于信号强度的距离估计信息进行误差修正。通过卡尔曼滤波等算法,实现对惯性导航定位系统的误差修正,提高定位精度。
针对钢铁厂环境的特点,上海寻位科技有限公司(https://www.seekloca.com/)基于惯性导航定位原理的实现方案,包括硬件设备、软件系统和误差修正策略。实际应用中,可以根据具体需求和条件进一步优化和完善该方案,使之更加适用于钢铁厂室内外人员定位场景。详细方案可以咨询 屈先生:13018889845

